

プレリリースより引用
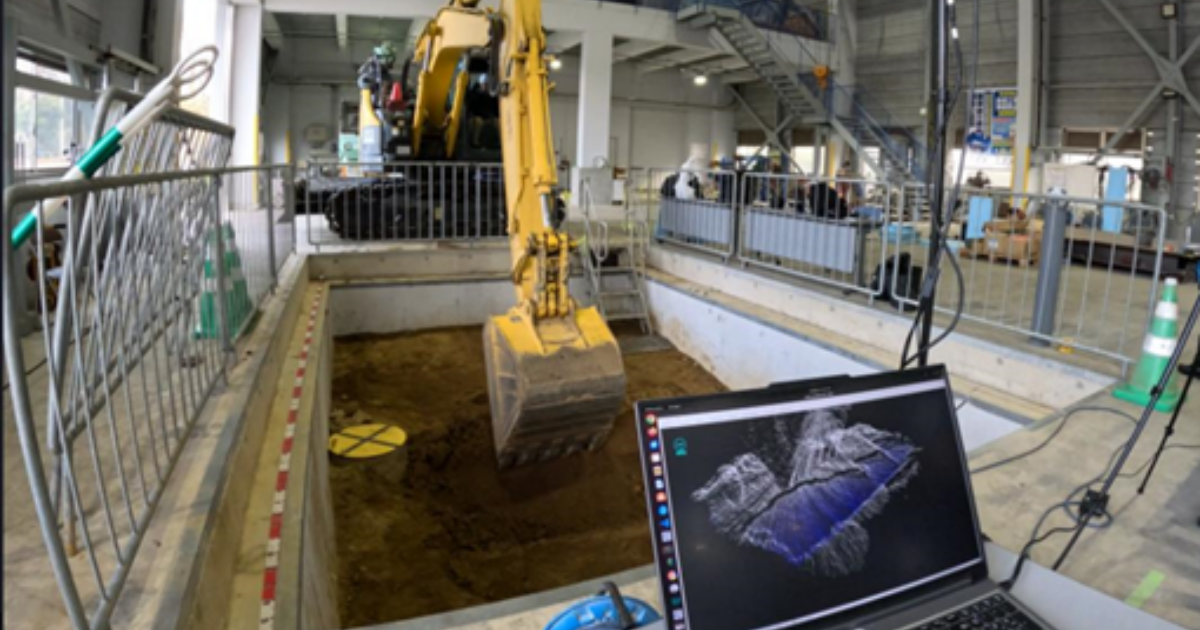
鉄建建設株式会社(本社:東京都、社長:伊藤 泰司氏、以下:鉄建建設)、CalTa株式会社(本社:東京都、代表取締役CEO:高津 徹氏、以下:CalTa)、株式会社マップフォー(本社:名古屋市中区、共同代表:橘川 雄樹氏、田中 一喜氏、以下:マップフォー)は、非GNSS環境下でも重機の動きや掘削形状をリアルタイムで自動検出・可視化できる新たなマシンガイダンス技術を共同開発しました。独自開発の自動検出システムと可搬式LiDARを組み合わせることで、建設現場の遠隔施工を支援し、生産性向上や労働環境の改善に貢献します。
建設業界では、労働力不足の深刻化に伴い、遠隔操作や自動化技術の導入が進んでいます。従来のマシンガイダンス技術は、重機への高精度な測位機器の設置や改修が必要であり、特にGNSS信号が届かない地下空間や屋内などでは適用が困難とされてきました。
今回開発された技術は、現場に設置した自動検出システムと可搬式LiDARを用い、取得した点群データをもとに重機の位置や動きを解析します。これにより、重機側に特別な改修を行うことなく、非GNSS環境下でも1cm単位での正確な位置把握が可能となります。運転手は、端末上に表示される視覚的な情報をもとに、リアルタイムで施工状況を確認しながら作業を行うことができます。
1cm単位の検出精度を実証、建設業のDX化に貢献
3社は屋内試験設備を用いた実証実験により、本技術の有効性を確認しました。LiDARとの距離が10m~30mの範囲でも、重機の動きや掘削地山の変化を1cm単位でリアルタイムに自動検出できることを実証しています。重機のバケット位置を正確に把握し、掘削部については深さをヒートマップで表示することも可能です。
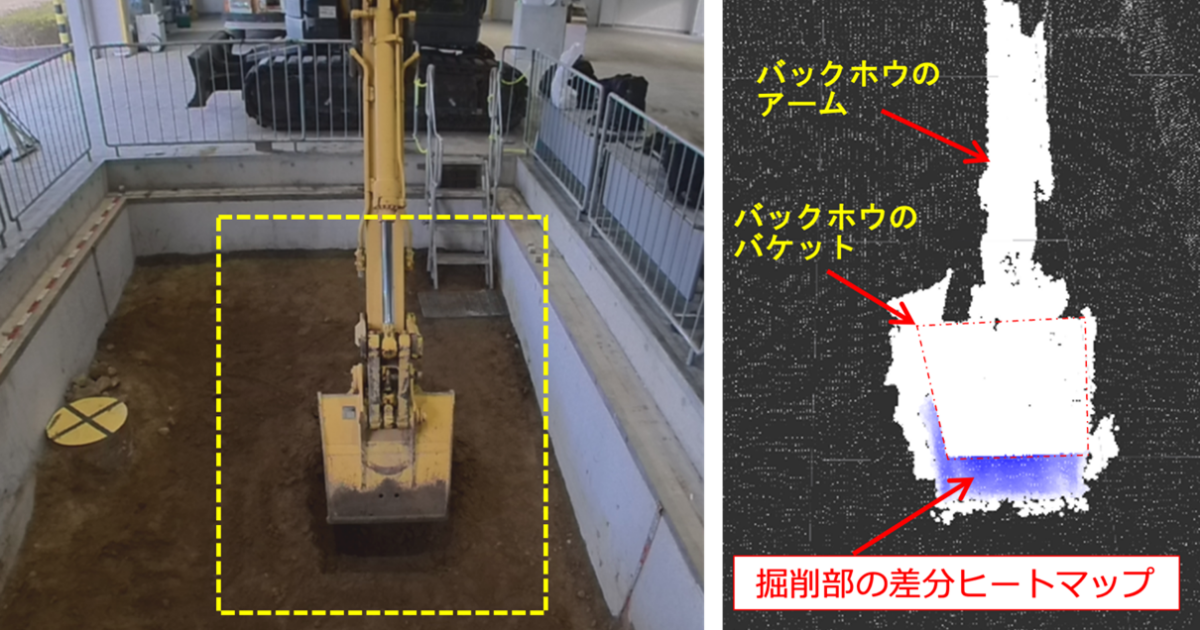
左キャプション:バックホウによる掘削状況 右キャプション:左写真における点線囲い部の拡大図。自動検出したバックホウの点群(白色)および掘削した部分の差分ヒートマップ表示(寒色系)を表している。バックホウの動きをリアルタイムで自動検出(右図ではバケットの位置が把握できている)するとともに、掘削部については掘削深さをリアルタイムに1cm単位でヒートマップ表示が可能
(プレリリースより引用)
今後は、実際の施工現場での適用に向けた検証を進め、マシンガイダンス技術の本格導入を目指します。この技術は、遠隔地からの施工管理を可能とし、建設業界におけるDXの推進、労働力不足の解消、そして安全性と生産性の両立に貢献することが期待されています。
併せて読みたい
Nagoya Startup Newsでは、名古屋を中心に東海圏におけるベンチャー企業や新技術に関連する最新情報、業務提携に関するニュースを配信しています。東海圏のベンチャー企業や新規事業、オープンイノベーション分野に興味のある方は、以下の関連記事も併せてご覧下さい。
株式会社マップフォーが愛知県事業の自動運転実証実験に参加協力を発表


